设为首页
收藏本站
切换到宽版
首页
Portal
产销平台
论坛
BBS
今日头条
导读
Guide
广播
Follow
圈子
Group
帮助
Help
淘帖
Collection
日志
Blog
登录
立即注册
排行榜
Ranklist
中械云配机械论坛
»
论坛
›
设计/自动化/电气/液压
›
机器人
机器人
0
人已收藏
暂无简介,请到后台添加
今日:
0
|
主题:
19
|
排名:
29
+ 收藏
发新帖
新窗
全部时间
排序方式
全部主题
全部
|
最新
|
热门
|
热帖
|
精华
隐藏置顶帖
置顶
「智链未来」中械云配:工程机械产业升级的数字化推手
4
2403
admin
发表于 2025-3-21
工业设计
机器人的视觉系统与路径规划
1
772
中械云配
发表于 2025-3-31
机器人
如何提高工业机器人的定位精度?
0
409
中械云配
发表于 2025-3-31
机器人
协作机器人的安全设计与防护机制
0
419
中械云配
发表于 2025-3-31
机器人
机器人在汽车制造中的最新应用
0
401
中械云配
发表于 2025-3-31
机器人
机器人在物流行业的创新应用
0
415
中械云配
发表于 2025-3-31
机器人
机器人技术的下一个突破方向
0
452
中械云配
发表于 2025-3-31
机器人
机器人伦理与社会影响
0
463
中械云配
发表于 2025-3-31
机器人
机器人的运动控制算法优化
0
511
中械云配
发表于 2025-3-31
机器人
机器人在医疗领域的创新应用
0
511
中械云配
发表于 2025-3-31
机器人
机器人在农业中的自动化应用
0
430
中械云配
发表于 2025-3-31
机器人
机器人技术的下一个突破方向
0
419
中械云配
发表于 2025-4-1
机器人
机器人伦理与社会影响
0
620
中械云配
发表于 2025-4-1
机器人
机器人运动控制精度如何提升?
0
555
中青鑫
发表于 2025-6-27
机器人
机器人编程中如何实现复杂路径规划?
0
565
中青鑫
发表于 2025-6-27
机器人
机器人视觉系统如何提高识别准确率?
0
522
中青鑫
发表于 2025-6-27
机器人
机器人协作作业如何实现精准配合?
0
612
中青鑫
发表于 2025-6-27
机器人
有哪些自动化公司在做RV减速机和谐波减速机的自动化装配线
0
555
机械打卡
发表于 2025-6-18
机器人
男孩因下棋犯规被机器人折断手指
0
605
机械打卡
发表于 2025-6-18
机器人
有哪些自动化公司在做RV减速机和谐波减速机的自动化装配线
0
442
机械打卡
发表于 2025-6-3
机器人
返 回
发布新帖
快速发帖
还可输入
80
个字符
高级模式
B
Color
Image
Link
Quote
Code
Smilies
您需要登录后才可以发帖
登录
|
立即注册
本版积分规则
发表帖子
转播给听众
图文热点
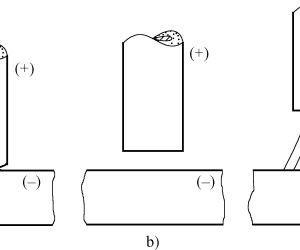
焊接电弧的引燃过程
1410 人气
#焊接
焊接电弧的物理基础
1370 人气
#焊接
立体车库中什么是一机一板?
544 人气
#工程机械
立体车库载车板有几种形式?
786 人气
#工程机械
推荐话题
1
「智链未来」中械云配:工程机械产业升级的数字化推手
2402 阅读
admin
2
【共建生态 智启未来】中械云配机械论坛全新上线!
584 阅读
admin
3
CAD软件在机械设计中的应用
834 阅读
科技小白
4
机器人的视觉系统与路径规划
772 阅读
中械云配
5
机器人传感器故障的快速排查与修复
633 阅读
中械云配
最新发布
焊接电源的影响
电弧的静特性与动特性
焊接电弧的热和力
电极斑点的跳动现象
焊接电弧的引燃过程
焊接过程的实质
电弧的静特性与动特性
焊接电弧的热和力
浏览过的版块
基础知识
纺织机械
工业设计
农机水力机械
重型矿山机械
印刷机械
数控技术
焊接
水射流技术
人才市场
关于我们
关于我们
加入我们
新闻动态
联系我们
服务支持
官方商城
成功案例
常见问题
售后服务
投诉/建议联系
yunguanwuliankeji@163.com
未经授权禁止转载,复制和建立镜像,
如有违反,追究法律责任
关注公众号
添加微信客服
Copyright © 2001-2026
中械云配机械论坛
版权所有
All Rights Reserved.
鲁ICP备18024662号-2
关灯
在本版发帖
扫一扫添加微信客服
返回顶部
返回顶部
返回版块
 焊接电弧的引燃过程1410 人气#焊接
焊接电弧的引燃过程1410 人气#焊接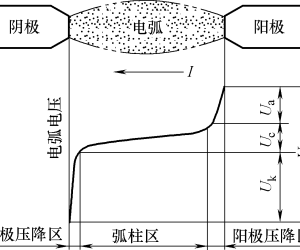 焊接电弧的物理基础1370 人气#焊接
焊接电弧的物理基础1370 人气#焊接 立体车库中什么是一机一板?544 人气#工程机械
立体车库中什么是一机一板?544 人气#工程机械 立体车库载车板有几种形式?786 人气#工程机械
立体车库载车板有几种形式?786 人气#工程机械

